No products in the cart.



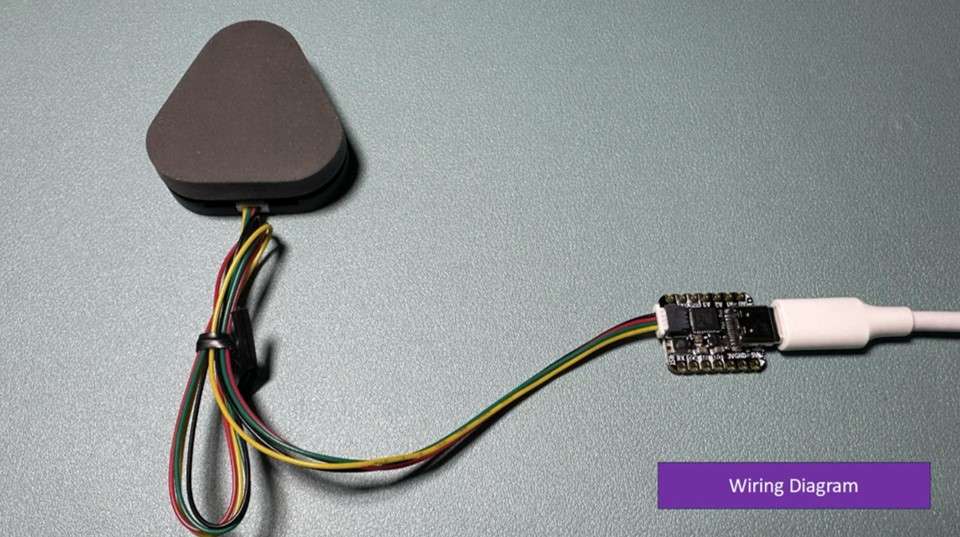
Este componente es la placa de circuito recomendada para el proyecto de sensores táctiles magnéticos eFlesh (“Magnetic Touch Sensing using Cut-Cell Microstructures”), que está destinada a integrarse con estructuras 3D imprimibles para dotar a robots o grippers de sensibilidad táctil magnética. arXiv+2e-flesh.com+2
Se trata del “corazón” del sistema de detección magnética: mide variaciones del campo magnético en tres ejes (3-axis) que se generan al deformar un cuerpo impreso con imanes embebidos, permitiendo que la placa detecte contacto, fuerza, deslizamiento, etc.
Características clave
Sensor magnético de 3 ejes de alta resolución, adecuado para integrarse en estructuras robóticas o módulos de contacto. WowRobo Robotics+1
Compacta y ligera, diseñada para integración directa en prototipos de robótica, manos robóticas, grippers o plantillas de pie para cuadrúpedos. WowRobo Robotics
Totalmente compatible con la plataforma open-source eFlesh: incluye soporte de software, modelos STL para impresión 3D, y flujo de trabajo de fabricación descrito en la investigación. arXiv+1
Ideal para prototipado rápido gracias a su integración sencilla con sensores magnéticos estándar e imanes de uso común.
Aplicaciones típicas
Montaje en dedos de manos robóticas o grippers para proporcionar sensibilidad al contacto y al deslizamiento.
Integración en superficies de agarre (por ejemplo, pies de robots cuadrúpedos) que requieren detección de fuerza o textura.
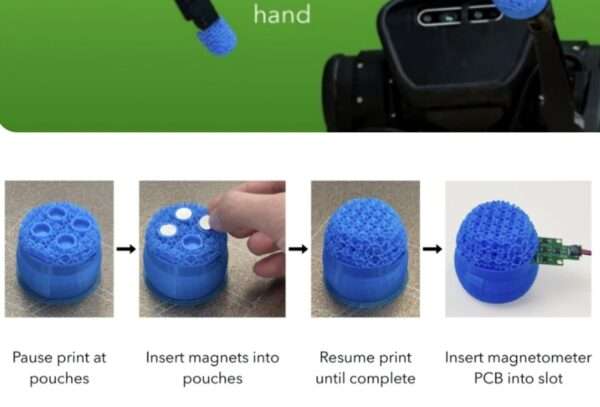
Experimentación y desarrollo de sensores táctiles personalizados mediante impresión 3D, donde se busca ajustar la geometría o la sensibilidad del sensor. La investigación eFlesh lo describe como “cuatro componentes bastan: impresora 3D, imanes, modelo CAD, y esta placa magnetométrica”.
Ventajas
Permite un diseño altamente personalizable del sensor táctil, adaptándose a distintas formas, geometrías y niveles de sensibilidad — todo gracias al enfoque de micro-estructuras “cut-cell”. arXiv+1
Buena precisión: en los experimentos de la investigación, se alcanzó una localización del contacto con un error medio de 0,5 mm, y errores de fuerza estimados de ~0,27 N en el eje normal, ~0,12 N en ejes de corte. arXiv+1
Ecosistema abierto: al estar basado en un proyecto abierto, permite que desarrolladores/modelistas accedan al diseño y adapten el sistema a sus necesidades.
Consideraciones / posibles limitaciones
Aunque la placa está lista, para aprovechar todas sus capacidades es necesario diseñar e imprimir la estructura del sensor (la parte flexible que incluye imanes) y combinarla correctamente con la placa. Es decir: la placa es un medio, pero se necesita el “skin” impreso.
Al tratarse de detección magnética, se debe tener cuidado con interferencias magnéticas externas u otros componentes que pudieran alterar el campo magnético medido.
Como es un módulo de prototipado avanzado, requiere conocimientos de integración electrónica, diseño 3D e impresión, así como programación si se desea explotar el software asociado.
🔍 Conclusión
El “eFlesh Magnetometer Board” de WowRobo es una excelente opción para quien esté desarrollando sensores táctiles robóticos personalizados y quiera aprovechar la investigación eFlesh. Ofrece una base robusta para medición magnética en 3 ejes, integrable en estructuras impresas y configurable para distintos requisitos de sensibilidad y forma.
Related Products