No products in the cart.






OpenArm – Open-Source Humanoid Robot Arm by Enactic
Brand:wowroboPrecio sin IVA: 7.000,00€
8.470,00€ (IVA incluido)
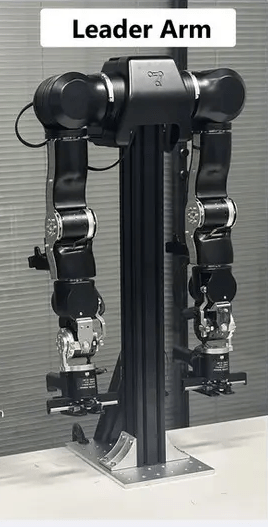
🤖 OpenArm: Brazo robótico humanoide open-source
OpenArm es un **brazo robótico humanoide completamente open-source diseñado para investigación de inteligencia artificial física (Physical AI) y aplicaciones en entornos donde se requiere interacción física con objetos y entornos reales. OpenArm+1
🧩 Características principales
✅ Totalmente de código abierto (open-source)
Todo el diseño de hardware, firmware, código de control y herramientas de simulación están disponibles públicamente para que lo uses, modifiques y adaptes según tus necesidades. OpenArm
👉 Documentación paso a paso: https://docs.openarm.dev/ docs.openarm.dev
👉 Código fuente en GitHub: https://github.com/enactic/openarm GitHub
🦾 OpenArm 01 – Modelo principal
OpenArm 01 es la primera versión oficial del brazo. Está diseñado para:
Investigación en IA física – ideal para laboratorios, universidades y desarrolladores que trabajan con robots que interactúan con el mundo físico. OpenArm
Entornos de contacto real donde el robot necesita manipular objetos con precisión y seguridad. OpenArm
Teleoperación con retroalimentación de fuerza para control fino y sensible. OpenArm
Puedes ver un vídeo de demostración aquí:
📺 OpenArm 01 – vídeo en YouTube: https://www.youtube.com/watch?v=6ZLM6f8kF4Q YouTube
🛠️ Capacidades técnicas
🔹 Control teleoperado con compensación de gravedad en tiempo real. OpenArm
🔹 Retroalimentación de fuerza bilateral para interacción física más natural. OpenArm
🔹 Simulación compatible con plataformas como MuJoCo e Isaac Sim para pruebas virtuales y entrenamiento de algoritmos. OpenArm
🔹 Disponible tanto como kit de montaje DIY como unidad pre-montada. OpenArm
🧠 Usos y aplicaciones
OpenArm se orienta para:
Investigación académica en robótica e IA. OpenArm
Desarrollo de algoritmos de aprendizaje reforzado y aprendizaje por imitación.
Prototipado de sistemas robóticos con diseño abierto. Tienda Camp Tecnologico
Experimentación avanzada en teleoperación y manipulación física con robots.
📍 Participación y comunidad
La plataforma está abierta a colaboradores, investigadores y entusiastas, con acceso a comunidades y soporte técnico:
👉 Únete al Discord: enlace desde la página oficial. OpenArm
Características principales
Grados de libertad: 7 DOF (7 grados de libertad), lo que permite movimientos complejos de tipo humanoide. futureTEKnow+2OpenArm+2
Diseño open-source: todos los archivos de hardware (CAD, STEP, STL), firmware y software de control están disponibles públicamente. GitHub+1
Comunicación de motor a través de bus CAN (Control Area Network) con frecuencia de hasta 1 Mbps, y previsión para CAN FD (higher bandwidth) en futuras versiones. Reazon Human Interaction Lab+1
Fabricación robusta: piezas metálicas estampadas y mecanizadas (sheet metal & CNC) en lugar de depender solo de impresión 3D, para mayor durabilidad. Reazon Human Interaction Lab+1
Alta “backdrivability” y cumplimiento mecánico (compliance), lo que significa que puede interactuar con entornos humanos o tareas de contacto sin ser rígido y peligroso. futureTEKnow+1
Integración con software de robótica: soporte para ROS2, simulación en motores físicos como MuJoCo, Genesis, y planificación de movimientos con MoveIt. OpenArm+1
Enfoque para investigación en “physical AI”: aprendizaje por imitación, teleoperación, manipulación en entornos de contacto real. futureTEKnow
Ventajas
Accesible en comparación con brazos robóticos cerrados/profesionales: como es open-source, permite una personalización profunda, coste reducido y adaptabilidad. OpenArm+1
Ideal para laboratorios, investigación, desarrollo de algoritmos de manipulación, robótica colaborativa, interacción humano-robot.
Plataforma escalable y modular, diseñada para permitir añadir diferentes efector final, cambiar motores, adaptar diseño mecánico según necesidad. Reazon Human Interaction Lab+1
Consideraciones / Limitaciones
Aunque es muy avanzada, al ser open-source y con diseño modular, requiere conocimientos técnicos: montaje, calibración, integración de software, configuración de control de motor.
Algunos detalles como carga útil (payload), alcance exacto, velocidad máxima no siempre están completamente especificados públicamente en los documentos básicos.
El ecosistema es de investigación principalmente: si bien está pensado para “uso real”, puede requerir modificaciones o adaptaciones para entorno industrial o de producción.
Verificar compatibilidad de alimentación, controladores, configuración eléctrica para tu entorno de trabajo.
Aplicaciones recomendadas
Investigación académica en robótica, manipulación de objetos, interacción humano-robot.
Desarrollo de algoritmos de aprendizaje reforzado, aprendizaje por demostración (imitation learning) en robots físicos.
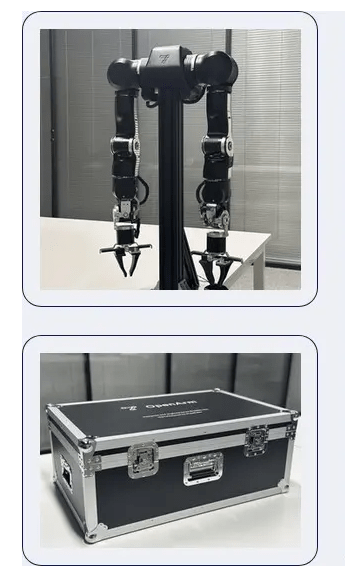
Prototipado de brazos humanoides, teleoperación, sistemas bimanuales.
Makers o startups que desean una plataforma abierta y personalizable para experimentos avanzados.
Related Products